
About Me
I am a Ph.D. candidate at the State Key Laboratory of Intelligent Transportation Systems, Beihang University, supervised by Prof. Zhiyong Cui and Prof. Yilong Ren. Prior to that, I received my Master's and Bachelor's degrees from Hunan University.
My research focuses on autonomous driving, simulation scenario generation through AI technologies. I am dedicated to developing safe, reliable, and efficient intelligent transportation systems through adversarial learning.
Education
2023 – Present
Ph.D. in Transportation Engineering
Beihang University (北京航空航天大学)
985
211
双一流

2020 – 2023
M.S. in Vehicle Engineering
Hunan University (湖南大学)
985
211
双一流
2016 – 2020
B.S. in Vehicle Engineering
Hunan University (湖南大学)
985
211
双一流
Publications
Journal
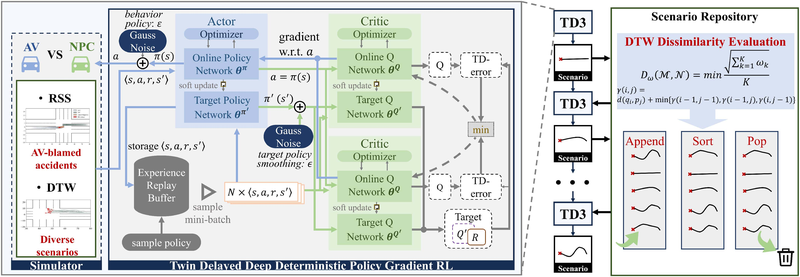
Text2Scenario: Text-Driven Scenario Generation for Autonomous Driving Test
Leverages a Large Language Model to autonomously generate simulation test scenarios from natural language inputs, extracting scenario components from a hierarchical repository and fabricating executable test scenarios via Domain Specific Language.
Automotive Innovation, 2025 | doi: 10.1007/s42154-025-00374-8
Autonomous driving (AD) testing constitutes a critical methodology for assessing performance benchmarks prior to product deployment. The creation of segmented scenarios within a simulated environment is acknowledged as a robust and effective strategy; however, the process of tailoring these scenarios often necessitates laborious and time-consuming manual efforts, thereby hindering the development and implementation of AD technologies. In response to this challenge, Text2Scenario is introduced, a framework that leverages a Large Language Model (LLM) to autonomously generate simulation test scenarios that closely align with user specifications, derived from their natural language inputs. Specifically, an LLM, equipped with a meticulously engineered input prompt scheme functions as a text parser for test scenario descriptions. The LLM extracts from a hierarchically organized scenario repository the components that most accurately reflect the user's preferences. Subsequently, by exploiting the precedence of scenario components, the process involves sequentially matching and linking scenario representations within a Domain Specific Language corpus, ultimately fabricating executable test scenarios.
Conference
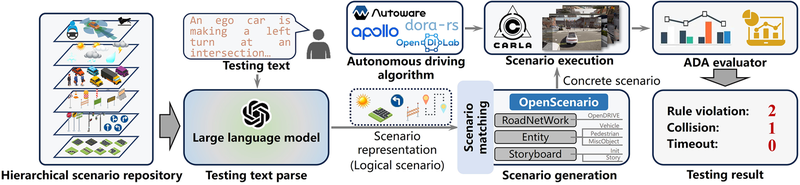
Vulnerability-aware and Curiosity-driven Adversarial Reinforcement Learning Policy for Safety-Critical Scenario Generation
Proposes a vulnerability-aware and curiosity-driven adversarial RL policy that uses a surrogate network to fit the victim's value function and random network distillation for exploration, significantly enhancing policy exposure in learning-based AVs.
2025 IEEE Intelligent Vehicles Symposium (IV), Cluj-Napoca, Romania
Autonomous vehicles (AVs) face significant threats to their safe operation in complex traffic environments. Adversarial policy for scenario generation has been established as a robust paradigm for enhancing AV resilience against adversarial perturbations through proactive exposure to synthetically engineered safety-critical scenarios. However, adversarial policies in existing methodologies often get stuck in a loop of over-exploiting established vulnerabilities, resulting in poor exploration for AVs. To overcome the limitations, we introduce a pioneering framework termed the vulnerability-aware and curiosity-driven adversarial reinforcement learning policy. Specifically, during the traffic vehicle attacker training phase, a surrogate network is employed to fit the value function of the AV victim, providing dense information about the victim's inherent vulnerabilities. Subsequently, random network distillation is used to characterize the novelty of the scenario, constructing an intrinsic reward to guide the attacker in exploring unexplored territories.
Journal
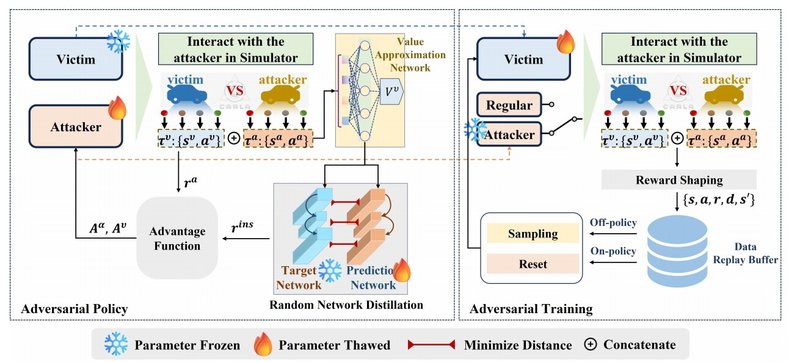
Adversarial Stress Test for Autonomous Vehicle via Series Reinforcement Learning Tasks With Reward Shaping
Introduces an evolving series RL framework for adversarial policy training, integrating RSS and DTW theories to shape the reward function, expediting the exploration of vulnerability-revealing scenarios for both black-box and white-box AV systems.
IEEE Transactions on Intelligent Vehicles, Vol. 10, No. 2, pp. 832–845, 2025
Testing is a pivotal phase for uncovering potential vulnerabilities in autonomous vehicles (AVs) to develop a secure autonomy system. However, existing methods often lack consideration for efficiently exploring multiple vulnerability-revealing cases, particularly under adversarial game scenarios. We introduce an evolving series reinforcement learning (RL) framework for adversarial policy training, integrating Responsibility Sensitive Safety (RSS) and Dynamic Time Warping (DTW) theories to shape the reward function to steer the evolving direction of the subsequent series agents for exploring vulnerability-revealing attack scenarios uncharted in the refined buffered repository. Our method undertakes adversarial stress tests for both black-box and white-box AV systems under test in driving tasks that engage in games with traffic vehicles and pedestrians. The results indicate that our approach expedites the exploration of additional scenarios blamed for the AV, outperforming the baselines in the vulnerability-revealing accident and scenario diversity.
Journal
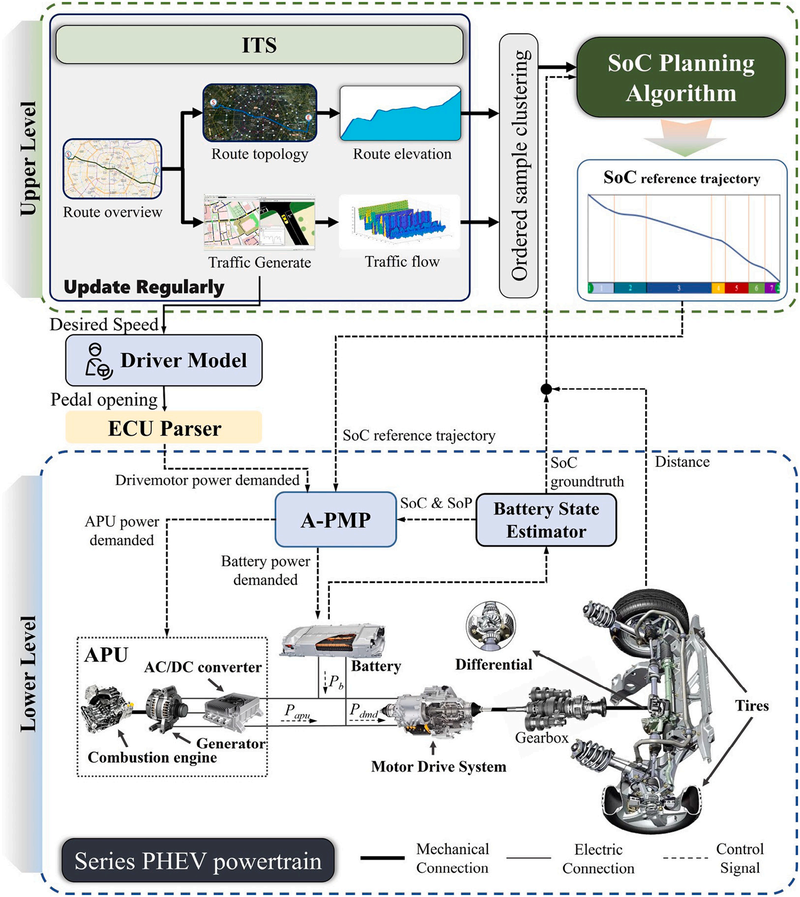
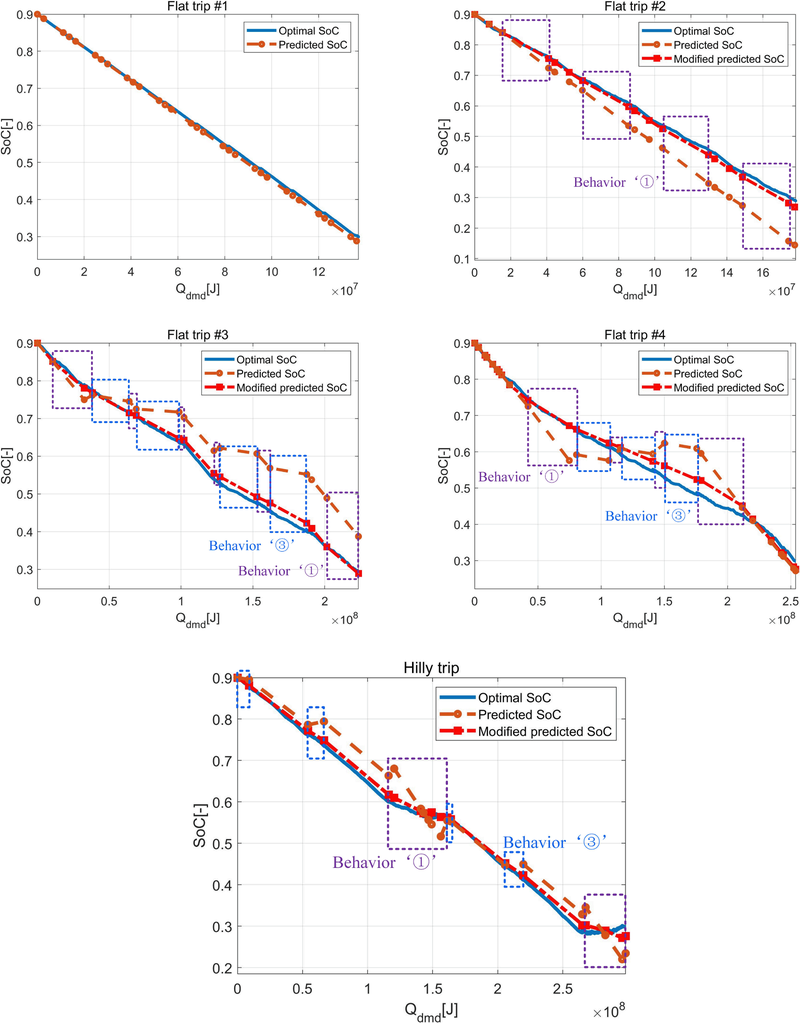
An explicit State-of-Charge planning solution for plug-in hybrid electric vehicle based on low-granularity prior-knowledge
Devises an explicit SoC planning method requiring only sparse traffic prior-knowledge, drawing inspiration from optimal charge depletion behavior, and develops a hierarchical predictive energy management framework integrating SoC planning and power split.
Energy, Vol. 313, 133990, 2024
The intervention of batteries in hybrid electric vehicles, when paired with an effective Energy Management Strategy (EMS), substantially improves fuel efficiency and reduces emissions in comparison to conventional internal combustion engine vehicles. The evolution of Intelligent Transportation Systems (ITS) has facilitated the possibility of predictive energy management (PEM) predicated on State-of-Charge (SoC) planning. Nevertheless, prevalent methodologies frequently encounter challenges in balancing optimization with real-time applicability. To address these limitations, we have devised an explicit SoC planning method that necessitates sparse traffic prior-knowledge, drawing inspiration from the optimal charge depletion behavior. This innovative method strategically determines the average SoC depletion rate for each anticipated driving road segment by integrating theoretical predictions of optimal depletion rate with experienced constraints. The results of the simulation experiments reveal that the SoC trajectories and fuel consumption generated by this method are in close approximation to theoretically optimal benchmarks.
Journal
Decoding the optimal charge depletion behavior in energy domain for predictive energy management of series plug-in hybrid electric vehicle
Reveals four aggregated optimal charge depletion behaviors through rigorous PMP-based analytical derivations, providing fundamental understanding on how and why optimal charge depletion rates behave in different driving conditions.
Applied Energy, Vol. 316, 119098, 2022
A critical issue for designing predictive energy management (PEM) strategy of Plug-in Hybrid Electric Vehicles is the planning of optimal global charge trajectory. Existing planning methods have flaws in terms of optimality or computational efficiency due to their lack of in-depth consideration about optimal charge depletion behaviors. To address this issue, rigorous theoretical analysis on the aggregated local and global optimal charge depletion behaviors in energy domain is conducted by combining Pontryagin's Minimum Principle-based analytical derivations and some qualitative reasoning. Fundamental understanding on how the optimal charge depletion rates behave in different driving conditions and why they exhibit such behaviors is provided. The theoretical analysis is further validated through model-in-the-loop tests using an experimentally validated high-fidelity vehicle simulator.
Patents
一种基于单一场景和多场景的自动驾驶方法
Awards
FTTE 2025 Rising Star Award (未来之星)
大学生创新创业大赛产业赛道二等奖
国家奖学金 (National Scholarship)
News
Jun 2025
One paper accepted to IEEE Intelligent Vehicles Symposium (IV 2025).
2025
One paper published in Automotive Innovation.
Feb 2025
One paper published in IEEE Transactions on Intelligent Vehicles.
2024
One paper published in Energy.
2023
Started Ph.D. studies at Beihang University.
2022
One paper published in Applied Energy.